The rapid analysis provided by the Large Area Scan Macroscope with a resolution of 5 μm has proven to be an essential tool for inspecting the microstructures of e.g. ice cores, both in the field and in the laboratory.
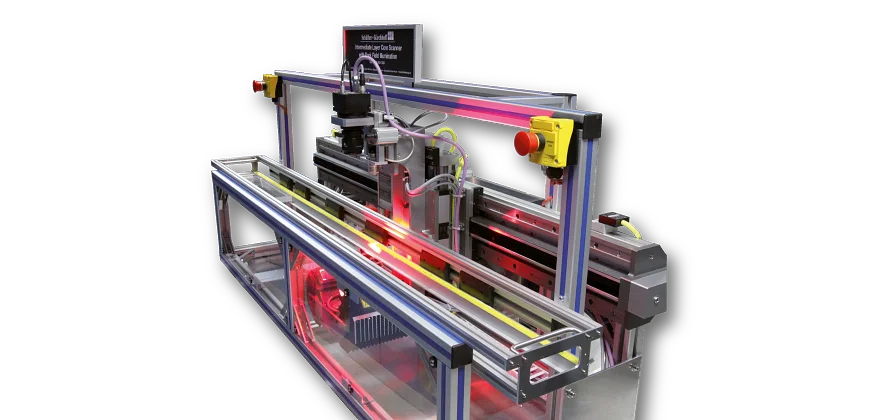
Scanner head
Time-consuming inspection using a microscope can be replaced by using the specially developed Large Area Scan Macroscope (LASM) with a monochrome Line Scan Camera.The Large Area Scan Macroscope consists of a Line Scan Camera, a high resolution lens as well as an illumination unit. The sample is imaged in reflection with a resolution of 5 μm (5080 dpi). The measuring width is 41 mm with a maximum scan length of 150 mm.
Bright-field illumination
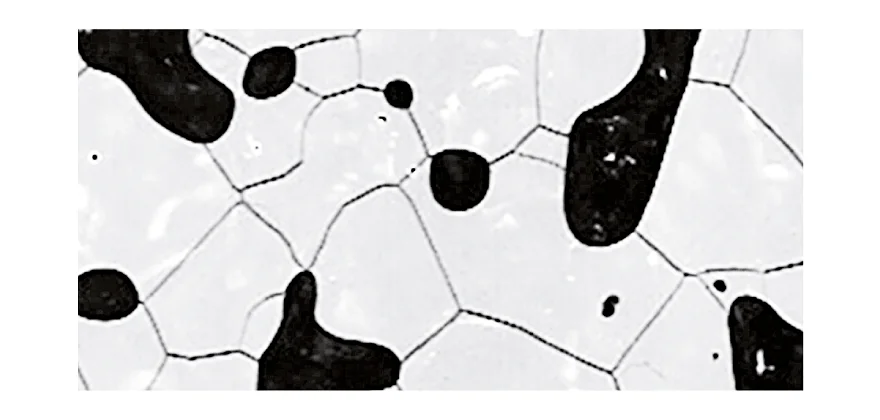
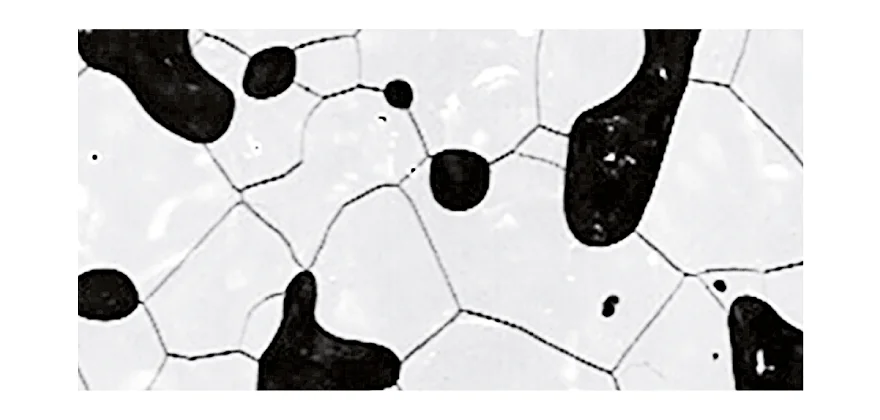
In order to capture the relevant microstructures, brightfield illumination is used. The light directed at the sample is reflected by surfaces parallel to the sensor. Light reflected from structured areas and edges is reflected away from the sensor and appears dark. For images obtained with this method, as a consequence the grain boundaries appear as dark lines and gas inclusions appear as dark bubbles or spots.
Undisturbed, High Quality Images in Much Less Time
While for the image acquisition technique using a conventional microscope, thousands of images have to be stitched to form a complete picture, only two or three scans are necessary using the Large Area Scan Macroscope depending on sample dimensions. This reduces the imaging time considerably and obviates the alignment and matching of the many individual images of these sections, which requires significant computing time. Since the microscope method takes a long time, for scanning ice cores, all images are additionally taken with slightly different contrast due to the ongoing sublimation process, which also needs to be corrected for. In order to stitch the complete picture, the images also have to be corrected for vignetting and distortion. Using the Large Area Scan Microscope, a shading correction done prior to scanning allows for evenly illuminated images that also do not show significant signs of distortion due to an excellent correction of the field of curvature. Since only two or three images are necessary to cover the whole sample the time required for stitching is severely reduced.
One of many applications: Ice core inspection
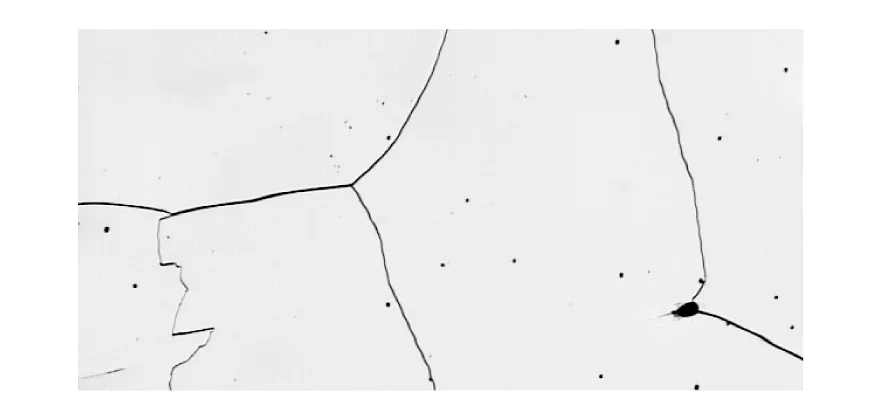
The figure on the right shows the scan of a ice cores sample.The ice core image from 60 m depth shows well defined grain boundaries (dark lines) and pores.
The short time necessary to acquire a complete picture (from >1 h to about 1 – 2 minutes) of an ice core allows for many more samples to be taken during the limited time available in the field, providing a much more detailed picture of the microstructure within the whole ice cores. Due to the short measuring time, many more samples can be measured from one ice core using LASM. Since the image acquisition is so fast, the ice core samples can even be scanned several times to document the sublimation process (for example right after microtoming, and some time later) which is not possible using the microscope technique.
A stratigraphic image that supports dating the ice cores can be obtained using the Intermediate Layer Core Scanner (ILCS).
High resolution imaging in harsh environments
As the analysis of the microstructure needs to be done in the field during drilling as well as in the lab, the line scanners developped fo analyzing ice cores need to be robust and insensitive to the harsh environment. The components used (mechanical, optical as well as electrical) are designed to work properly at temperatures down to -20°C / -40°C. Mobile scanner systems (like the SK-LASM-41-05-49-J01 described here) are stable and robust enough to endure the long and bumpy ride to and from the drilling site and have been used in the field in Antarctica as well as in Greenland multiple times. Whenever drilling is not ongoing they are used in the lab, e.g. at AWI in Bremerhaven.
More information on microstructure mapping of ice cores can be found on https://www.awi.de/forschung/geowissenschaften/glaziologie/werkzeuge/microstructure-mapping.html.
DEEPICE Project
http://pastglobalchanges.org/science/end-aff/deepice