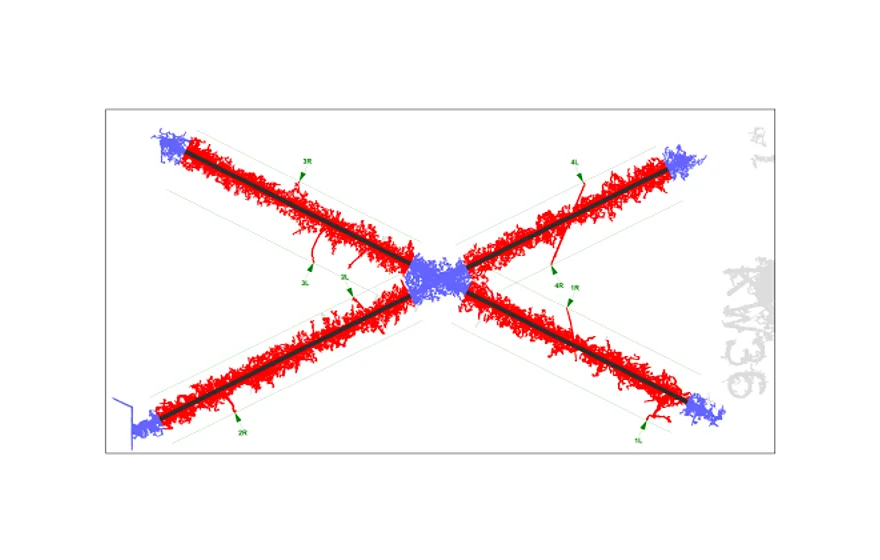
- Corrosion evaluations on car rims or wheel segments, as well as on corrosion test panels
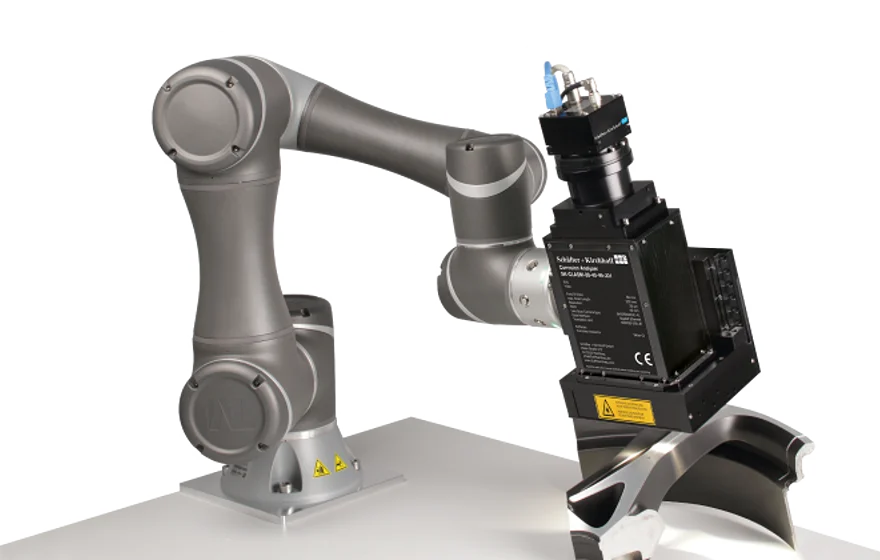
- Partial scanning of installed parts on cars, e.g. wheels, doors, bumpers, etc.
- Imaging and optical quality control of any kind of coatings
For more information refer to the robot-guided line scan camera and the Corrosion Inspector.